1 Hintergrund
2 Mission
3 System
3.1 Mechanik
3.2 Elektronik
3.2.1 CCD-Einheit
3.2.2 Optik
3.2.3 Prozessor
3.2.4 Speicher
3.2.5 A/D-Wandler-Einheit
3.2.6 Spannungsversorgung
4 Verbindung zu anderen Systemen im Satelliten
5 SCOPE - Ihre Augen im Himmel
SCOPE ist die Abkürzung für "Spacecraft Camera experiment for Observation of Planets and the Earth". 1990, auf dem Treffen der Satellitenbauer an dem das Phase-3-D-Projekt ins Leben gerufen wurde, machte JAMSAT den Vorschlag, eine Farb-LCD-Kamera als Experiment zu fliegen. In Hinsicht auf die bei Amateurfunksatelliten einmalige 3-Achsen-Stabilisierung, zeigten die Teilnehmer des Treffens großes Interesse an diesem Plan und ermutigten JAMSAT das Projekt voranzutreiben. 1991, auf dem zweiten Treffen der Satellitenbauer, stellte JAMSAT die ersten kurzen Spezifikationen vor. Für das Experiment wurden im Satelliten folgende Ressourcen reserviert: 5 kg Masse, 5 Liter Volumen und 5 Watt Leistungsaufnahme.
Anfangs wurde SCOPE mit drei Kameras geplant, jeweils eine mit Tele-, Normal- und Weitwinkel-Objektiv. Im Entwicklungsprozeß wurde klar, daß durch die Gewichts- und Volumenbegrenzung des Satelliten drei Kameras nur schwer unterzubringen sind. Außerdem zeigten erste Studien des Stabilisierungssystems, daß es nicht machbar ist, die Tele-Kamera mit der notwendigen Genauigkeit auszurichten, um z.B. das Bild eines Planeten verwacklungsfrei einzufangen. Mit Bedauern haben wir uns deshalb entschieden, die Kamera mit dem Teleskop-Objektiv wegzulassen.
Nach Abschluß der Konzeptphase ging man nun zum Hardware-Entwurf über. Ende 1993 wurde ein Testaufbau erstellt, der die grundlegende Funktion darstellte. 1994 und 1995 erstellte das Team mehrere Funktions-Modelle um verschiedene Konzepte im Detail zu testen und sich für eines zu entscheiden. Als Ergebnis wurde das endgültige Konzept festgelegt und das Team beschäftigte sich fortan mit der Beschaffung und dem Zusammenbau der Teile für das Flug-Modul (FM) und das Reserve-Modul. Während dieser Zeit wurden Diskussionen mit anderen AMSAT-Gruppen geführt, die teilweise zu Verbesserungen des Experiments führten. 1996 wurde das Flug-Modul fertiggestellt und einer Reihe Tests unterzogen. In einer Umwelt-Simulations-Kammer wurden grundlegende Funktionen sowie der Betrieb unter Einfluß von Vakuum und Temperatur untersucht. Dabei wurden charakteristische Daten bei verschiedenen Temperaturen ermittelt, sowie das gesamte System ausführlich getestet.
Im Februar 1997 wurde das flugfähige Modul an das Phase-3-D Labor in Orlando übergeben, wo es elektrische und mechanische Tests erfolgreich absolvierte. Somit befindet sich das SCOPE Projekt jetzt in seiner allerletzten Phase.
Das SCOPE Projekt hat die folgenden drei Ziele:
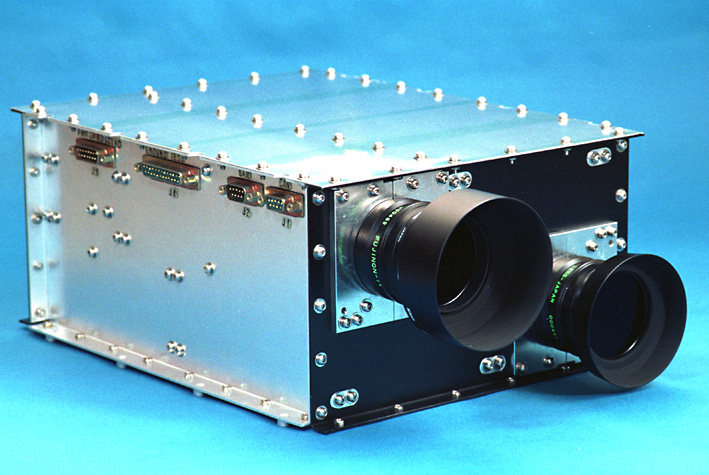
In einem einzigen Modul-Gehäuse befinden sich zwei Kameras, Kamera-A mit einem kleinen Öffnungswinkel und Kamera-B mit einem großen Öffnungswinkel. Ursprünglich war geplant, jede Kamera einzeln in einem Gehäuse unterzubringen. Aufgrund der satellitenbedingten Gewichts- und Platzbeschränkungen müssen jedoch die Kameras das Gehäuse teilen.
Mit dem Abmessungen von 297 x 227 x 130.6 mm (T x B x H) besitzt das Modul Standardgröße, abgesehen von seiner Höhe.
Das SCOPE-Modul mit seinen beiden Kameras wiegt 5.4 kg und ist somit so leicht, wie jedes einzelne der anfänglich geplanten Kamera-Module. Dies ist das Ergebnis unserer Abmagerungs-Anstrengungen bezüglich Gewicht und Volumen.
Die Elektronik besteht aus fünf Einheiten:
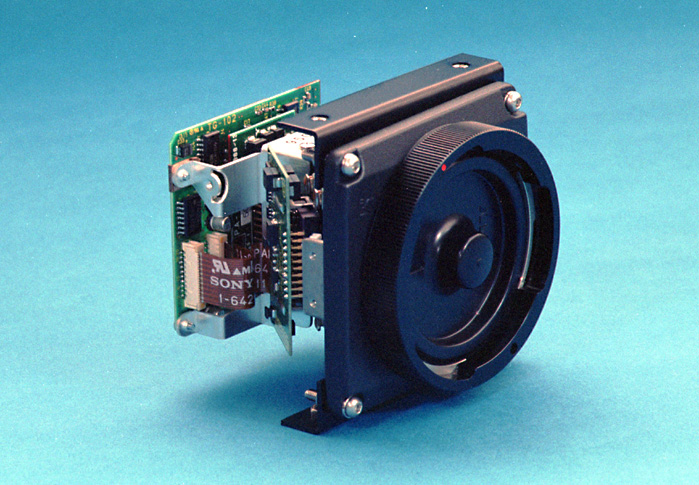
Ursprünglich sollte eine CCD mit Frame-Transfer und auf dem Chip liegendem, streifenförmigen Farbfilter verwendet werden. Dieser Typ von Baustein vereinfacht die daran angeschlossene Elektronik. Jedoch fanden wir heraus, daß die verwendeten Filter aus organischem Material bestehen, das sich in der harten Weltraumumgebung schnell verschlechtert, weshalb wir uns gegen diesen CCD-Typ entschieden haben. Nun verwenden wir eine 3-CCD-Einheit, wie sie in PAL-Kameras für industrielle Bildverarbeitung verwendet wird. Die Einheit besteht aus einem dichroitischen Prisma um die Farben zu trennen und drei CCDs mit Inter-Line-Transfer für die Farben Rot, Grün und Blau. Im Prisma wird durch zwei dichroitische Schichten der Strahlengang in die einzelnen Farbanteile aufgeteilt. Diese Filter benutzen keinerlei organisches Material und sind voll weltraumtauglich.
Technische Daten: der CCD-Einheit:
Diese CCD-Aufnehmer sind kommerziell erhältlich, als Ersatzteile für professionelle Kameras nach PAL-Standard. Die Aufnehmer wurden lediglich leicht modifiziert, um direkt von dem Prozessor angesteuert werden zu können.
Als Optik werden normale Zoom-Objektive verwendet. Die Zoom-Funktion wird im Weltraum nicht benutzt, sondern vor dem Start auf eine feste Brennweite eingestellt. Randbedingungen für die Brennweite sind unter anderem die den Strahlengang störenden benachbarten Objekte (V-Band-Antenne) und der Orbit. Der exakte Zoom-Faktor wird erst dann eingestellt, wenn der zukünftige Orbit und der gewünschte Blick auf die Erde endgültig festgelegt wurde. Beide Kameras verwenden die gleiche Zoom-Optik, es werden lediglich verschiedene Zoom-Faktoren eingestellt um die unterschiedlichen Öffnungswinkel zu realisieren.
Der freie Öffnung der Linse beträgt 41.5 mm, die geplanten Öffnungswinkel (FOV, Field of View) betragen zur Zeit 16 Grad für Kamera A und 32 Grad für Kamera B. Es werden neutrale Graufilter (ND Filter, Neutral Density) verwendet, die die Kameras auf die Helligkeit der Erde anpassen. Es werden jeweils drei Filter hintereinander verwendet, einmal x4 und zweimal x8, womit sich ein Gesamtfaktor von x256 ergiebt. Auch die Graufilter und die Verkleidung sind modifizierte Standardkomponenten.
Das üblicherweise in den Objektiven verwendete Fett würde im Weltraum teilweise verdampfen und sich störend auf den Linsen niederschlagen. Um dieser fatalen Verschlechterung der Optik vorzubeugen wurden beide Objektive auseinandergenommen, gründlich entfettet und mit weltraumtauglichem Fett versehen. (Ein paar Gramm solches Fett kosten gut 100 US-Dollar!) Desweiteren wurde der Fokus für Unendlich korrigiert. Dies ist notwendig, da die Brechung der Lichtstrahlen im Vakuum anders ist als in der Erdatmosphäre.
Zum Zeitpunkt der Erstellung dieses Artikels () waren die Daten des zukünftigen Orbits noch nicht bekannt. Ausgehend von der Annahme, daß das Apogäum 47000 km und das Perigäum 4000 km beträgt, ergibt sich folgende berechnete Auflösung von Objekten auf der Erdoberfläche:
| Apogäum | Perigäum | |
|---|---|---|
| Kamera A | 25km / Pixel | 4.6km / Pixel |
| Kamera B | 50km / Pixel | 9.2km / Pixel |
Um die Schaltung einfach zu halten, verwendet SCOPE einen TMP68301, mit einem 68000er CPU-Kern. Der Baustein hat 3 UART-Kanäle, Timer/Counter, Adress-Decoder, Wait Generator, Interrupt-Controller und einen 16-Bit Parallel-Port, alles auf einem Chip.
Um den Stromverbrauch reduzieren zu können, ist die Taktfrequenz zwischen 16 MHz und 8 MHz umschaltbar.
Als Boot-ROM mit entsprechenden Boot-Routinen wird der von AMSAT weltraumerprobte HM-6617 (fused link ROM) verwendet. Dieser ROM-Typ ist bekanntermaßen sehr zuverlässig, selbst im Weltraum. EPROMs, wie sie üblicherweise in den Computern auf der Erde verwendet werden, sollten nicht im Weltraum eingesetzt werden, da der darin gespeicherte Inhalt durch Strahlung (geladene Teilchen) gelöscht werden kann. Jede SCOPE-Kamera hat zwei Fuse-Link-ROMs, die redundant geschaltet sind.
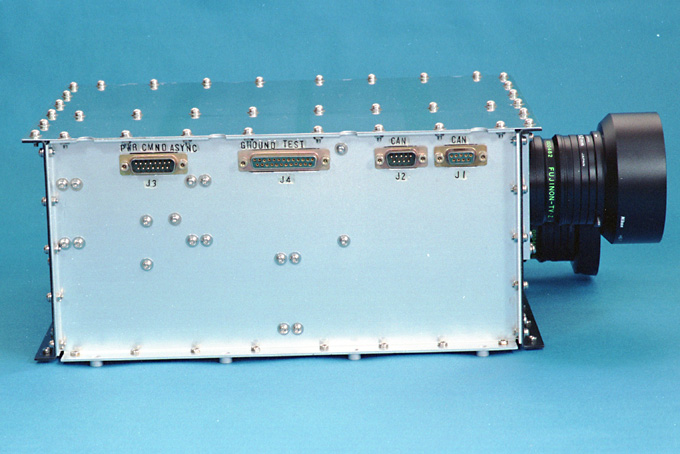
Die Prozessor-Einheit enthält unter anderem noch einen RS-485 Asynchron-Port sowie einen CAN-Bus-Anschluß (Control Area Network), der mit den anderen Modulen im Satelliten kommuniziert, um den Programmcode zu laden, Befehle und Bilddaten auszutauschen.
Der Speicher besteht aus 4 MB statischem RAM (HM628512 SRAM). Davon ist 1 MB mit EDAC (Error Detection And Correction) ausgestattet. Dabei sorgt der Baustein IDT39C60 für das Aufspüren und Korrigieren ungewollter Veränderungen. Solche Veränderungen können durch starke Strahlung, sogenannte SEUs (Single Event Upsets) entstehen, die unter Weltraumbedingungen durchaus normal sind.
Ungewollte Veränderungen im Programmcode können zu Systemabstürzen führen. Deshalb wird der Programmcode in dem EDAC-Speicher (fehlerkorrigierender Speicher) gehalten, wobei die weniger empfindlichen Bild-Daten in normalem Speicher gehalten werden.
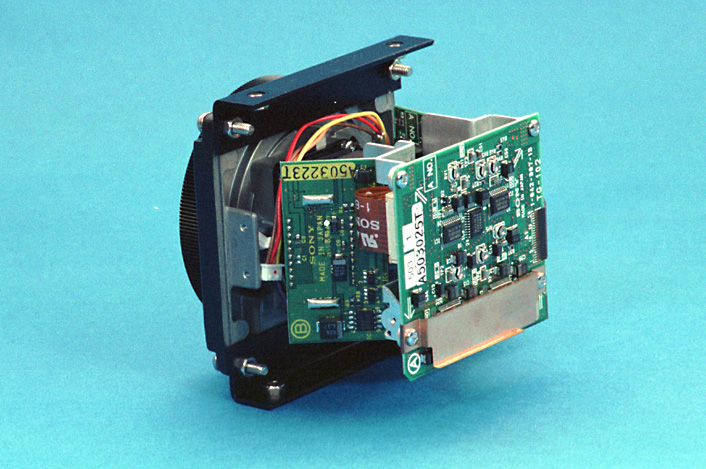
Die Analog/Digital-Wandler-Einheit besteht aus drei identischen A/D-Wandlern, jeweils einen für den roten, grünen und blauen CCD-Chip. Jeder Wandler hat eine Auflösung von 8 Bit, zusammen ergibt das eine Farbtiefe von 24 Bit (16.7 Millionen Farben).
Zwischen jedem CCD-Aufnehmer und seinem A/D-Wandler befindet sich ein Verstärker mit einstellbarer Verstärkung (Faktor 1 bis 8), um den Signal-Pegel anzupassen zu können.
Die Ausgangssignale der A/D-Wandler werden von dem Prozessor in den 3MB
non-EDAC-Speicher abgelegt.
Die A/D-Wandler-Einheit enthält unter anderem die Treiberbausteine
und Temperaturkontrollschaltungen für den CCD-Block.
Die Spannungsversorgungs-Einheit erhält +10.6 Volt vom Haupt-Spannungs-Bus des Satelliten und erzeugt daraus
+5V, +15V und -9V zur Versorgung der SCOPE-Einheit. Es wurde eine "Flyback"-Schaltung mit
Hilfe des Schaltregler-ICs LM2577 aufgebaut. Um die Last gleichmäßig zu verteilen, wurden zwei ähnliche
Netzteile aufgebaut, das eine erzeugt nur die +5V, das andere die +15V und -9V. Der Leistungsbedarf
beträgt etwa 5 Watt pro Kamera, was sehr Nahe an den ursprünglich geplanten Wert herankommt.
Direkt mit den SCOPE-Kameras verbunden sind die IHU (Integrated House-keeping Unit) und RUDAK-U.
Jede der beiden Kameras wird mittels eines einzigen Bits von der IHU an- und ausgeschaltet.
SCOPE kommuniziert mit RUDAK-U über den CAN-Bus oder alternativ über eine RS-485 Multi-Drop-Verbindung. Dabei stellt SCOPE sozusagen RUDAK-U seine Augen zur Verfügung, wogegen RUDAK-U für SCOPE die Ohren und den Mund darstellt. SCOPE wartet zum einen auf neuen Code, der mittels der Boot-ROMs geladen werden kann, zum anderen werden die von RUDAK-U über den CAN-Bus übermittelten Befehle ausgewertet. Die von SCOPE aufgenommenen Bilder werden an RUDAK-U übertragen, dort gespeichert und später an die Bodenstationen weitergereicht.
Die RS-485 Multi-Drop-Verbindung dient als Backup für den CAN-Bus, beide Kameras sind hierüber an RUDAK-U angeschlossen.
Die SCOPE-Kameras auf dem Satelliten Phase-3D werden in Zukunft Ihre Augen im Weltraum sein. JAMSAT hat davon geträumt, solche Augen im Weltraum zu haben. Augen, die uns Bilder von unserer Erde in Echtfarben zeigen.
Das JAMSAT-SCOPE-Team möchte seinen Mitgliedern und allen, die das
Phase 3-D Projekt unterstützt haben, aufrichtig danken.
Es hat uns eine Menge Freude bereitet, mit den talentierten Mitgliedern
des SCOPE-Projekts sowie den anderen beteiligten AMSAT-Organisationen
zusammenzuarbeiten.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}