JAMSAT SCOPE プロジェクト
JAMSAT 日本アマチュア衛星通信協会
(暫定版 97.6.3) (改定版 98.9.30)
SCOPE プロジェクト
1. バックグラウンド
SCOPEとは、Spacecraft Camera experiment for Observation of Planets and the Earthの略称で、「惑星と地球を観測するための衛星搭載カメラの実験」です。Phase-3D衛星計画が始動した1990年、ドイツで開催された第1回衛星製作者会議において、搭載実験モジュールとして、フルカラーCCDデジタル・カメラの概念設計をJAMSATより提案しました。3軸安定方式であるPhase-3D衛星の特徴を生かしたこの提案は、会議出席者の興味を集め、その実現に期待が寄せられました。翌1991年の第2回衛星製作者会議では、仕様の大枠を提案し、カメラのために、5Kg-5リットル-5Wの衛星リソースを確保することができました。
当初は、望遠、狭角および広角の各レンズを持った3台のカメラから構成されるSCOPEプロジェクトでしたが、衛星本体の設計の進捗とともに、重量および実装スペースの観点から3台のカメラの搭載は困難となり、狭角および広角のレンズを持った2台のカメラへと、規模が縮小されました。また、Phase-3D衛星の姿勢制御の精度では、望遠レンズで惑星の拡大像を捉えることが困難であることも、姿勢制御系の設計とともに明らかになってきました。
計画当初の概念設計からハードウエアの詳細設計へ移行し、1993年末には動作概念検証用のブレッドボード・モデル(BM)が製作されました。1994年から1995年には詳細設計検証用のエンジニアリング・モデル(EM)の試作を繰り返し、プロジェクト・チームは設計の確定に努めました。EMの評価を通じて、1995年には打ち上げに供するフライト・モデル(FM)の設計を完了し、最終的なハードウエア部品の調達と製造へとプロジェクトは突入しました。この間、Phase-3D計画を推進する各国のAMSATグループと打合せを繰り返し、細かい設計の修正を経て、1996年にはFMの組み立てを完了しました。組み立て完了以来、基本動作確認、温度試験、動作特性データ取得を経て、1997年2月には、衛星本体との電気的/機械的フィット試験を行い、SCOPEプロジェクトは、最終局面を迎えた訳です。
2. ミッション
SCOPEプロジェクトの目的には、以下の3点があります。
高高度軌道(遠地点=47000km、近地点=4000km)からのフルカラー(可視光)撮像
従来のアマチュア衛星でも、カメラを搭載したものがありましたが、その画像は専らモノクロが主体でした。宇宙に浮かぶ青い地球の姿を、月へ向かうアポロ宇宙船から宇宙飛行士が見たかのようにフルカラーで見せてくれるのが、SCOPEのカメラです。
地球センサーとして、衛星姿勢制御の支援
衛星軌道から、地球の姿を目的の構図で捉えてくれるのが、Phase-3D衛星の特徴である3軸姿勢制御です。この3軸姿勢制御は、モーメンタム・ホイール、地球センサーおよび太陽センサーで構成されています。これらのセンサーの校正およびバックアップに、SCOPEのカメラを用いることができます。
将来の惑星間航行プロジェクトに対する航行支援センサーの検証
AMSATグループにおいては、将来の計画として惑星間航行衛星が候補に挙がっています。惑星間を航行するにはスター・トラッカと呼ばれる航行支援センサーが必要となります。SCOPEのカメラには、比較的明るい恒星を捉える能力があり、これがスター・トラッカの可能性を秘めています。また、到達した惑星の姿を捉えることも可能でしょう。
これらの可能性を、Phase-3D衛星で検証します。
3. システム構成
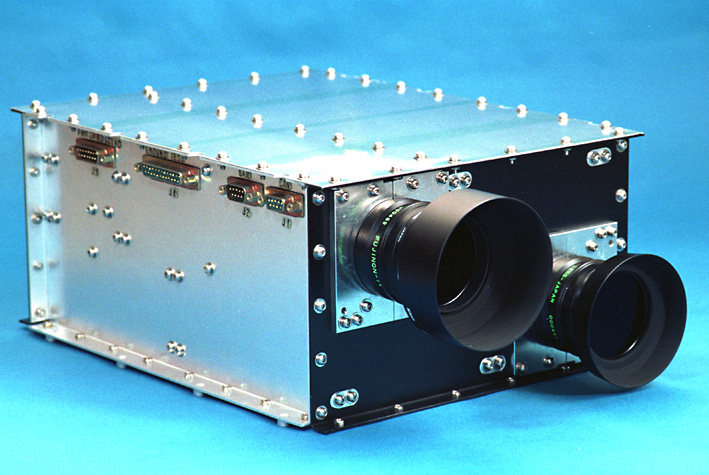
3.1 機構
狭角レンズのカメラ-Aと、広角レンズのカメラ-Bが同一のモジュール・ケースに実装されています。当初、2台のカメラを夫々独立したケースに収めることで設計を進めていましたが、衛星本体との重量およびスペースの関係から、 一つのケースに2台のカメラを実装して、実装スペース・ファクタを改善することになりました。
ケースのサイズは、297(D) x 227(W) x 130.6(H) mmであり、 高さ(H)以外の寸法は、他のモジュール同様、衛星の統一規格に従ったものとなっています。
質量は、5.4kgとなりました。これは、計画当初に見積もった1台当たりの質量に匹敵するもので、軽量化の努力が効を奏したものです。
3.2 回路構成
回路は、CCDヘッド、CPU部、メモリー部、A/D変換部および電源部から構成されています。
3.2.1 CCDヘッド
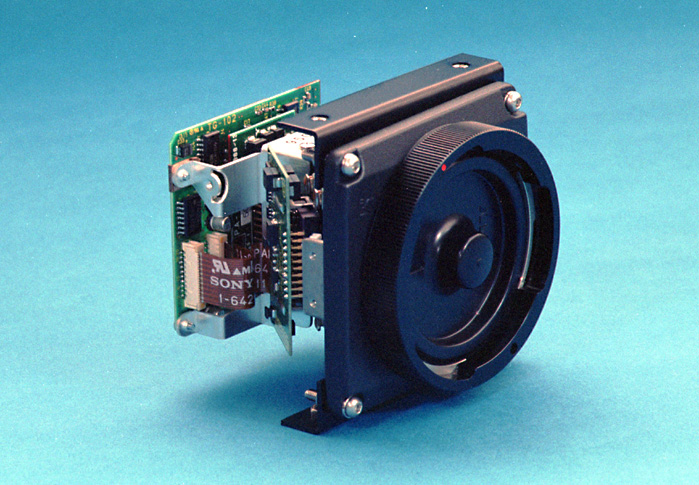
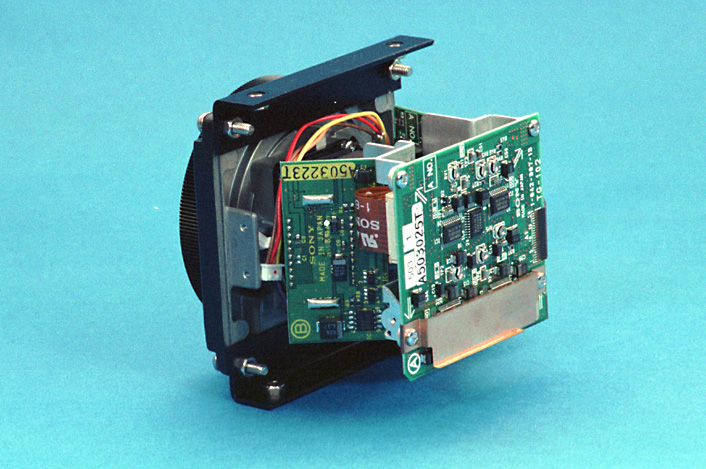
設計当初には、チップ上に3色のカラーフィルタを有するフレーム転送型CCDの採用が検討されました。このCCDは周辺回路が簡単になる反面、有機材料で作られたカラーフィルタ材質の宇宙空間での経時変化が問題となるため、その採用を取り止めたいきさつがあります。代わりに採用したのが、画像処理分野等で使用されている PALカメラの3CCDヘッドでした。3CCDヘッドは、入射光をRGB3色に分解する ダイクロイック・ミラーと3枚のインターライン転送型CCDから構成されています。ダイクロイック・ミラーはプリズムの一種であり、有機材料を使わないため宇宙空間での安定性に優れています。
CCDの仕様は、以下の通りです。
a.イメージサークル=1/2インチ
b.有効画素数=752(H) x 582(V)
c.ピクセル・サイズ=8.6(H) x 8.3(V) micron
CCDヘッドは市販工業用PAL規格のカメラの部品を購入し、CPUで直接駆動できるように改造しています。
3.2.2 光学系
レンズには、採用したCCDヘッド専用に設計された市販のズーム・レンズを採用しました。搭載時にはズーム動作は行いませんが、 画角内に写り込む可能性があるレンズ周辺のアンテナや、衛星の最終軌道が確定した時点で、ズームを固着します。狭角のカメラAと広角のカメラBでは、同一のレンズを用いて、ズーム比率を変えてそれぞれに対応しています。
レンズの有効口径(Front Clear Aperture of Lens)は41.5mmで、 カメラAの垂直FOV(Field Of View)は16度、 カメラBの垂直FOVは32度となる予定です。被写体である地球の明るさに対応するため、ND(Neutral Density)フィルタをレンズに装着して、減光を図ります。各レンズには x4, x8, x8 の3枚のNDフィルターが装着され、x256 の減光率を得ています。NDフィルターやフードも市販のものを一部改造して利用します。
市販のレンズの内部に使われている潤滑油は、真空中で揮発する恐れがあり、そのまま宇宙では使えません。フライトモデルに使われるレンズは、市販品を一旦分解洗浄し、宇宙規格の潤滑油を使って組み直すという処理を施しています。また、真空中と大気中とでは屈折率が異なるため、計算値にもとづいて調整を行ないこれを補正します。
現時点では軌道要素は確定していません。しかし、遠地点高度 47000km、近地点高度 4000km と仮定すると計算上の地上の物体の分解能は次の通りになります;
Camera-A : 25km/pixel @ 遠地点, 4.6km/pixel @ 近地点
Camera-B : 50km/pixel @ 遠地点, 9.2km/pixel @ 近地点
3.2.3 CPU部
CPUには、モトローラの68000系をコアとするTMP68301を採用して、回路の簡略化を図っています。このCPUには、3チャンネルのUART、タイマ、カウンタ、アドレスデコーダ、ウエイト発生回路、割り込みコントローラおよび16ビット・パラレル・ポートが1チップに集積されています。
CPUのクロックを、16MHzから8MHzに低減することが可能で、消費電力の低減が可能です。
CPUがブートするためのプログラム・コードを格納するROMには、AMSATグループで実績のあるHM-6617を使用しています。このROMは、フューズ(Fused Link)ROMと称するもので、宇宙環境での動作の安定性に優れています。一般のPC等で使用されているPROMでは、宇宙環境での荷電粒子等の影響で格納されたデータが変化してしまうため、使用することができません。このカメラでは、さらに信頼性を上げるため、このフューズROMを2組使用して、冗長系を構成しています。
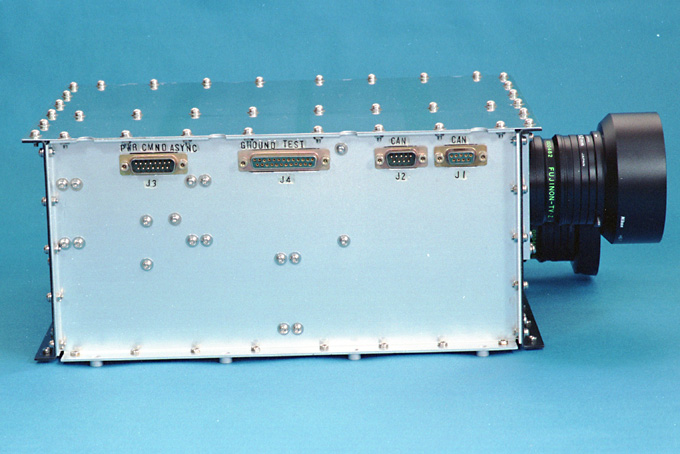
また、CPU部には、撮像データの転送や地上からのコマンドのために、衛星内の他のサブシステムとシリアル通信を行うための、RS-485によるASYNCラインと、CAN(Control Area Network)バスのインターフェースが装備されています。
3.2.4 メモリー部
メモリー部には、合計4MバイトのHM628512 SRAM(Static RAM)が搭載されています。このうちの1Mバイトには、IDT39C60を用いたEDAC(Error Detection And Correction=誤り検出/訂正)回路が付加されており、宇宙環境で発生するSEU(Single Event Upset)現象と呼ばれるメモリー内容の一時的な変化を検出し、その誤りを訂正します。
このEDAC付きメモリーには、動作上誤りが許されないプログラム・コードを格納し、EDAC無しメモリーには画像データを格納するという使い分けを行います。
3.2.5 A/D変換部
A/D変換回路は、RGB3枚のCCD毎に設けられています。A/D変換の分解能は8ビットで、24ビット/3色で約1670万色を再現します。
A/D変換器の前処理として、1から8倍の可変増幅率を持つアンプがあり、A/D変換器に与えるCCD出力電圧を調節します。
A/D変換器の出力は、CPUによって、3MバイトのRAMに格納されます。
また、A/D変換部には、CCD駆動回路とCCD温度検出回路も併せて実装されています。
3.2.6 電源部
電源部は、衛星内部の+10Vバスから、カメラが必要とする+5V、+15Vおよび-9Vの電圧を作り出しています。これらの電圧は、スイッチング電源専用ICであるLM2577を用いたフライバック型電源が供給しています。
ロードレギュレーションを改善するために、+5V用に一台の電源を、+15Vと-9V用に一台の電源を、合計2台の電源を用いています。
消費電力は、当初見積り通りの約5W/カメラを達成しました。
4.他のシステムとのインターフェース
SCOPEカメラを取り巻く他のシステムとしては、IHU(Integrated House-keeping Unit)とRUDAK-Uがあります。
IHUからの1ビットのパラレル信号で、カメラのON/OFFが制御されます。
RUDAK-Uとは、CAN-BUSおよびRS-485にてインターフェースされています。SCOPEカメラを目とすれば、RUDAK-Uはいわば耳と口の役割を担うものです。SCOPEカメラは、地上からのブートローディング・コードをRUDAK-Uを経由して、CAN-BUSから聞き取ります。また、地上からのコマンドも同様です。一方、SCOPEカメラで捉えた画像データはRUDAK-Uに一旦蓄積され、RUDAK-Uはこのデータをダウンリンク信号として地上へ語り掛けるのです。
RS-485は、CAN-BUSのバックアップとして用意され、RUDAK-UとSCOPEの2台のカメラの間だけを結んでいます。
5.最後に
Phase-3Dに搭載されたSCOPEカメラは、「宇宙に浮かぶ貴方の目」となることでしょう。JAMSATは貴方とともに、SCOPEカメラから見える青い地球を夢みています。
SCOPEプロジェクトとPhase-3D衛星計画を力強く支援して支援するJAMSAT会員、P3D支援会員の皆様に感謝します。また、SCOPEプロジェクトのチームメンバーと各国のAMSATグループの仲間達とこの夢を分かち合えることを喜びとしつつ、この壮大な国際衛星プロジェクトのすべての参加者と支援者すべてに感謝します。
JAMSAT SCOPE PROJECT TEAM
Text by JA6XKQ
|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}